Architecture
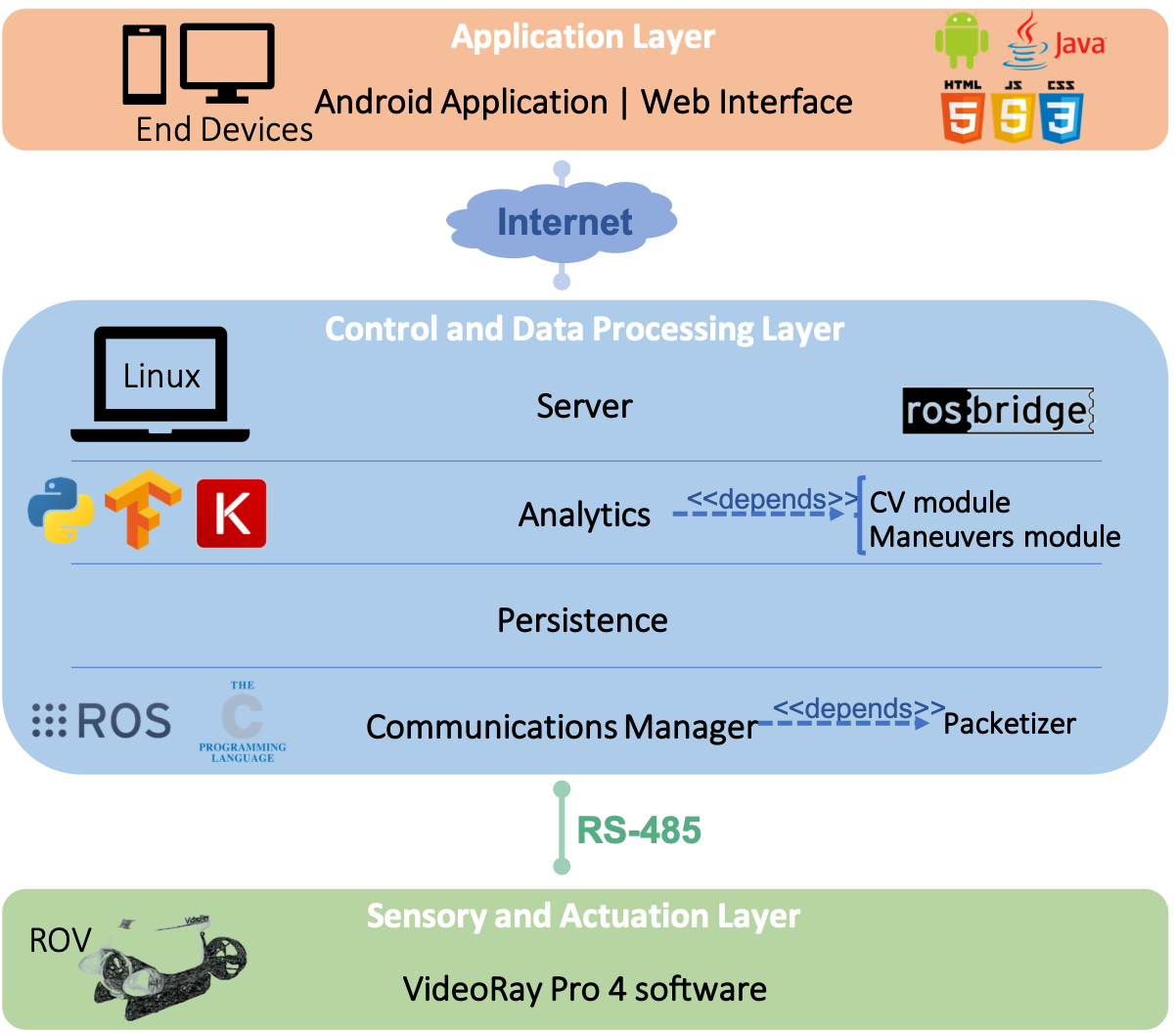
The ExpROVer system sports a layered architecture with 3 levels:
- The sensory and actuation layer, composed by the VRP4 and its integrated sensors and actuators
- The data processing and control layer, composed of a Linux computer or server machine directly connected to the VRP4 through its umbilical cord, both integrating the information received and sent to the ROV with the ROS; and analyzing the video information, running an object detection algorithms, as well as the logic responsible for semi-autonomous maneuvers
- The application layer, running the Android or web ExpROVer application, interacts with users over the end devices
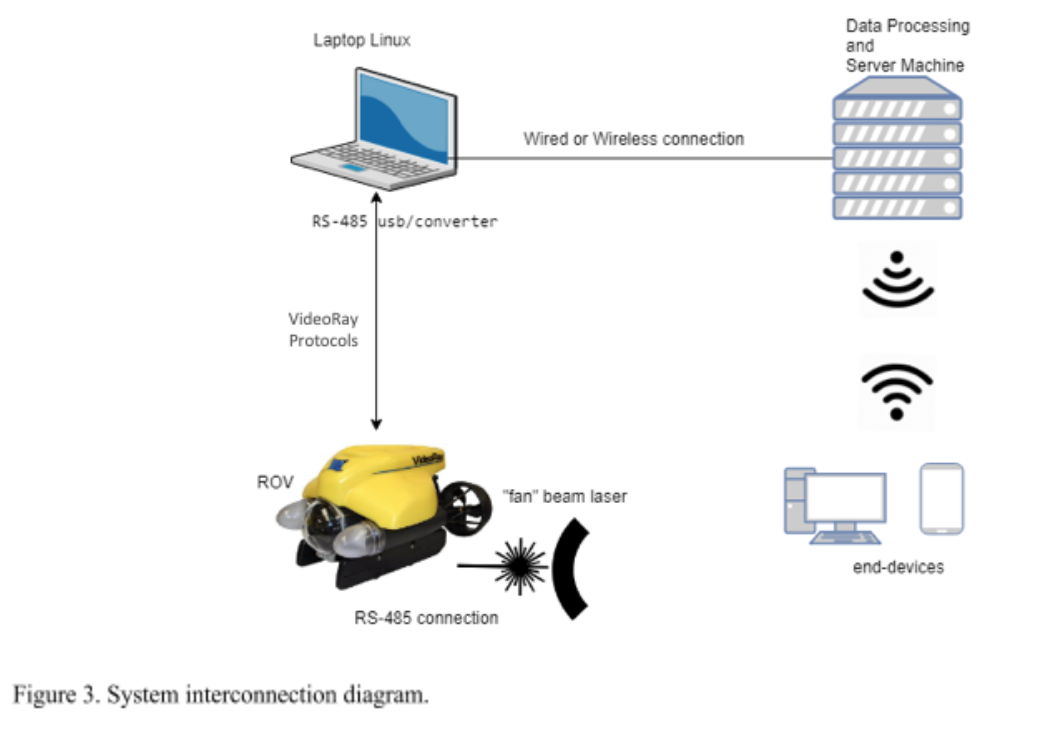
The VRP4 supports a wide array of sensors and other peripherals that either are or can be integrated with the ROV. These peripherals enable additional functionality, such as distance and size estimation, enabled through a fan beam laser and two parallel lasers, respectively. The attached sensors (as the laser peripherals, manipulator arms) are connected to the ROV through the VRP4’s unique port, that supports RS-485.
The ROV must be connected through an umbilical cord that powers the system and allows the user to both send commands to control the ROV and receive the sensory inputs which allow them to monitor its status.
This raw video and sensor data are processed and analyzed by the server machine, and the results are relayed to the active end devices. These devices are responsible for issuing high level instructions which the server machine will then break down into the actual ROS messages that the VRP4 will execute.
Another of the system’s functioning and modules is depicted in Figure 9:
The VPR4 integrates several sensors:
- A camera,
- A pressure sensor, which indicates its current depth,
- A 3 axes compass, which indicates its heading,
- 3 axes accelerometers, which indicate its attitude,
- A water temperature sensor, which indicates the temperature of the water surrounding the VRP4,
- An internal temperature sensor, which indicates its internal temperature,
- And an internal humidity sensor, which indicates the relative humidity of the air inside the ROV.
It also presents a myriad of actuators, amongst which the most relevant are the following:
- Camera controllers, affecting configurations such as focus and tilt,
- Port, starboard and vertical thrusters’ velocity and acceleration controllers,
- And its lights’ intensity controller.